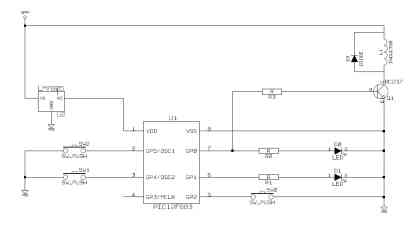
Programowalny sterownik PWM powstał jako urządzenie służące to sterownia czasem otwarcia elektrozaworu odpowiedzialnego za podawanie oleju smarującego na łańcuch. Nazwanie tego urządzenia sterownikiem PWM (english → Pulse Width Modulation → Modulacja Szerokości Impulsu) jest troszkę na wyrost, ponieważ szerokość impulsu oraz okres sygnału jaki jest regulowany zawiera się w przedziale od sekundy do kilkudziesięciu sekund. Obwód drukowany oraz schemat elektryczny urządzenia zostały stworzone w środowisku KiCad. Całym urządzeniem steruje mikrokontroler PIC12F683 firmy Mircochip. Zastosowany mikrokontroler jest ośmiobitowy. Posiada on 3,5[KB] pamięci programu, 128 bajtów pamięci RAM oraz 256 bajtów pamięci EEPROM. Program dla mikrokontrolera został napisany w wersji demo środowiska programistycznego dla mikrokontrolerów PIC mikroC PRO for PIC. Zdecydowano się właśnie na środowisko MikroC, ponieważ posiada ono wbudowany kompilator do programowania mikrokontrolerów PIC rodziny 12F w języku C. Wersja demo programu mikroC posiada ograniczenie w postaci maksymalnej liczby 2000 słów kodu. Całe urządzenie tworzy kilka elementów są nimi: wspomniany mikrokontroler, trzy monostabilne przełączniki, trzy rezystory, dwie diody LED, dioda prostownicza, tranzystor NPN oraz stabilizator napięcia LM7805. Na schemacie elektrycznym zaznaczona jest cewka L1, cewka ta symbolizuje cewkę elektrozaworu włączoną do obwodu elektronicznego. Dioda prostownicza zabezpiecza układ przed przepięciami związanymi z napięciem indukowanym w cewce L1 → uL=L·di/dt. Przepięcia będą powstawać w wyniku włączania/wyłączania zasilania cewki elektrozaworu. Zadaniem stabilizatora jest możliwość zasilenia sterownika z układu zasilania motoru (12VDC).

Generalnie zasada działania sterownika PWM jest dość prosta. Korzystając z trzech wyłączników monostabilnych mamy możliwość ustawienia okresów czasu załączenia TON oraz TOFF. Okres sygnału wyjściowego jest więc równy T=TON+TOFF. Wypełnienie impulsu jest równe TON/T lub TON/(TON+TOFF) Sterownik skonfigurowany fabrycznie, nie posiada żadnych ustawień. Konieczne jest więc jego wstępne skonfigurowanie. Po pierwszym uruchomieniu zasygnalizuje on potrzebę pierwszego zaprogramowania. Stan sterownika sygnalizowany jest poprzez dwie diody LED. Programowanie odbywa się poprzez równoczesne wciśnięcie przełącznika programowania oraz przełącznika wybranego czasu, który jest aktualnie ustawiany. Przełącznik programowania wywołuje przerwanie w mikrokontrolerze. Minimalna rozdzielczość czasu możliwego do ustawienia wynosi Tmin1[s]. Po zaprogramowaniu wartość zadana czasu jest automatycznie zapisywana w pamięci EEPROM. Zastosowanie pamięci EEPROM zapewnia pamiętanie ustawień przez sterownik na wypadek zaniku zasilania.