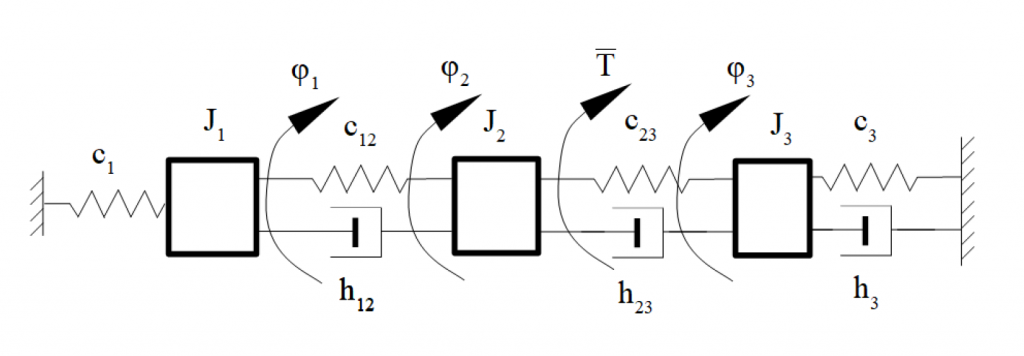
Dynamika trójmasowego układu mechanicznego w ruchu obrotowym. W rozważanym przykładzie zastosowane zostanie zapis energii w formie wariacyjnej tj. innymi słowy w postaci równań Eulera-Lagrange’a pierwszego rodzaju.
Ogólna postać równań Lagrange’a
L = E_k - V
Równania Lagrange’a pierwszego rodzaju:
\frac{d}{dt}\frac{\partial{L}}{\partial{{\dot{q_i}}}} - \frac{\partial{L}}{\partial{q_i}} + \frac{\partial{D}}{\partial{{\dot{q_i}}}} = \sum_{k}{Q_{k}}Znaczenie symboli:
L \rightarrow Lagrangian E_k \rightarrow energia \,kinetyczna V \rightarrow energia \,potencjalna D \rightarrow \,dyssypacja \,energii q_i \rightarrow zmienna \,o \,indeksie \,i \dot{ q_i} \rightarrow pierwsza \,pochodna \,po \,czasieZmienne w rozważanym układzie mechanicznym:
q_1 = \varphi_1, \dot q_1 =\dot \varphi_1 q_2 = \varphi_2, \dot q_2 =\dot \varphi_2 q_3 = \varphi_3, \dot q_3 =\dot \varphi_3Energia kinetyczna:
E_k = \frac{1}{2}\cdot J_1 \cdot \dot{\varphi_1}^2 + \frac{1}{2}\cdot J_2 \cdot \dot{\varphi_2}^2 + \frac{1}{2}\cdot J_3 \cdot \dot{\varphi_3}^2Energia potencjalna:
V = \frac{1}{2}\cdot c_1 \cdot \varphi_{1}^2 + \frac{1}{2}\cdot c_{12} \cdot (\varphi_{2} - \varphi_{1})^2 + \frac{1}{2}\cdot c_{23} \cdot (\varphi_{2} - \varphi_{3})^2 + \frac{1}{2}\cdot c_3 \cdot \varphi_{3}^2Dyssypacja energii:
D = \frac{1}{2}\cdot h_{12} \cdot (\dot\varphi_{2} - \dot\varphi_{1})^2 + \frac{1}{2}\cdot h_{23} \cdot (\dot\varphi_{2} - \dot\varphi_{3})^2 + \frac{1}{2}\cdot h_3 \cdot \dot\varphi_{3}^2Równania dla zmiennej q1:
J_1 \cdot \ddot \varphi_1 - (-c_1 \cdot \varphi_1 - c_{12} \cdot (\varphi_2 - \varphi_1) \cdot (-1)) + (h_{12}\cdot (\dot \varphi_2 - \dot \varphi_1)\cdot (-1)) = 0
J_1 \cdot \ddot \varphi_1 + c_1 \cdot \varphi_1 - c_{12} \cdot (\varphi_2 - \varphi_1) - h_{12}\cdot (\dot \varphi_2 - \dot \varphi_1) = 0
J_1 \cdot \ddot \varphi_1 = - c_1 \cdot \varphi_1 + c_{12} \cdot (\varphi_2 - \varphi_1) + h_{12}\cdot (\dot \varphi_2 - \dot \varphi_1)
Równania dla zmiennej q2:
J_2 \cdot \ddot \varphi_2 - (-c_{12}\cdot (\varphi_2 - \varphi_1) -c_{23}\cdot (\varphi_2 - \varphi_3)) + (h_{12}\cdot (\dot\varphi_2 - \dot\varphi_1) + h_{23}\cdot (\dot\varphi_2 - \dot\varphi_3)) = T
J_2 \cdot \ddot \varphi_2 + c_{12}\cdot (\varphi_2 - \varphi_1) + c_{23}\cdot (\varphi_2 - \varphi_3) + h_{12}\cdot (\dot\varphi_2 - \dot\varphi_1) + h_{23}\cdot (\dot\varphi_2 - \dot\varphi_3) = T
J_2 \cdot \ddot \varphi_2 = - c_{12}\cdot (\varphi_2 - \varphi_1) - c_{23}\cdot (\varphi_2 - \varphi_3) - h_{12}\cdot (\dot\varphi_2 - \dot\varphi_1) - h_{23}\cdot (\dot\varphi_2 - \dot\varphi_3) + T
Równania dla zmiennej q3:
J_3 \cdot \ddot \varphi_3 - (-c_{23}\cdot (\varphi_2 - \varphi_3)\cdot(-1) -c_{3}\cdot \varphi_3) + (h_{23}\cdot (\dot\varphi_2 - \dot\varphi_3)\cdot(-1) + h_{3}\cdot \dot\varphi_3) = 0
J_3 \cdot \ddot \varphi_3 - c_{23}\cdot (\varphi_2 - \varphi_3) + c_{3}\cdot \varphi_3 - h_{23}\cdot (\dot\varphi_2 - \dot\varphi_3) + h_{3}\cdot \dot\varphi_3 = 0
J_3 \cdot \ddot \varphi_3 = c_{23}\cdot (\varphi_2 - \varphi_3) - c_{3}\cdot \varphi_3 + h_{23}\cdot (\dot\varphi_2 - \dot\varphi_3) - h_{3}\cdot \dot\varphi_3