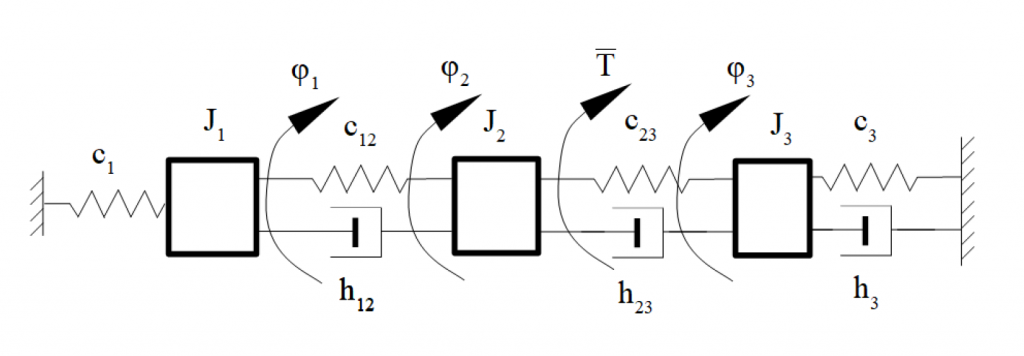
W przykładzie rozpatrzony zostanie układ mechaniczny o trzech stopniach swobody. W jednym miejscu układu przyłożony jest zewnętrzny moment T. Rozpatrywany układ posiada w swojej strukturze elementy sprężyste i tłumiące.
Układ mechaniczny o trzech stopniach swobody Równanie dla pierwszego stopnia swobody:
J_{1}\cdot \ddot{\varphi_1} = -c_1\cdot\varphi_1 + c_{12}\cdot(\varphi_2 - \varphi_1) + h_{12}\cdot(\dot{\varphi_2} - \dot{\varphi_1})
Równanie dla drugiego stopnia swobody
J_{2}\cdot \ddot{\varphi_2} = -c_{12}\cdot(\varphi_2 - \varphi_1) - h_{12}\cdot(\dot{\varphi_2} - \dot{\varphi_1}) - c_{23}\cdot(\varphi_2 - \varphi_3) - h_{23}\cdot(\dot{\varphi_2} - \dot{\varphi_3}) + T
Równanie dla trzeciegostopnia swobody
J_{3}\cdot \ddot{\varphi_3} = -c_3\cdot\varphi_3 - h_3\cdot\dot\varphi_3+ c_{23}\cdot(\varphi_2 - \varphi_3) + h_{23}\cdot(\dot{\varphi_2} - \dot{\varphi_3})