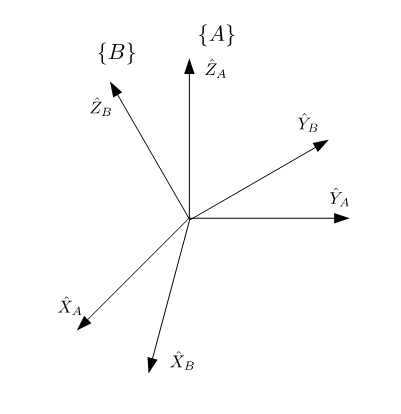
Macierz rotacji opisuje transformację pomiędzy dwoma układami współrzędnych. W przedstawionym przykładzie są dwa układy kartezjańskie {A} i {B}. Wyznaczona zostanie macierz rotacji opisują transformację z układu {B} do układu {A}. Znajomość takiej macierzy pozwala na przetransformowanie współrzędnych dowolnego wektora z układu {B} do układu {A}.
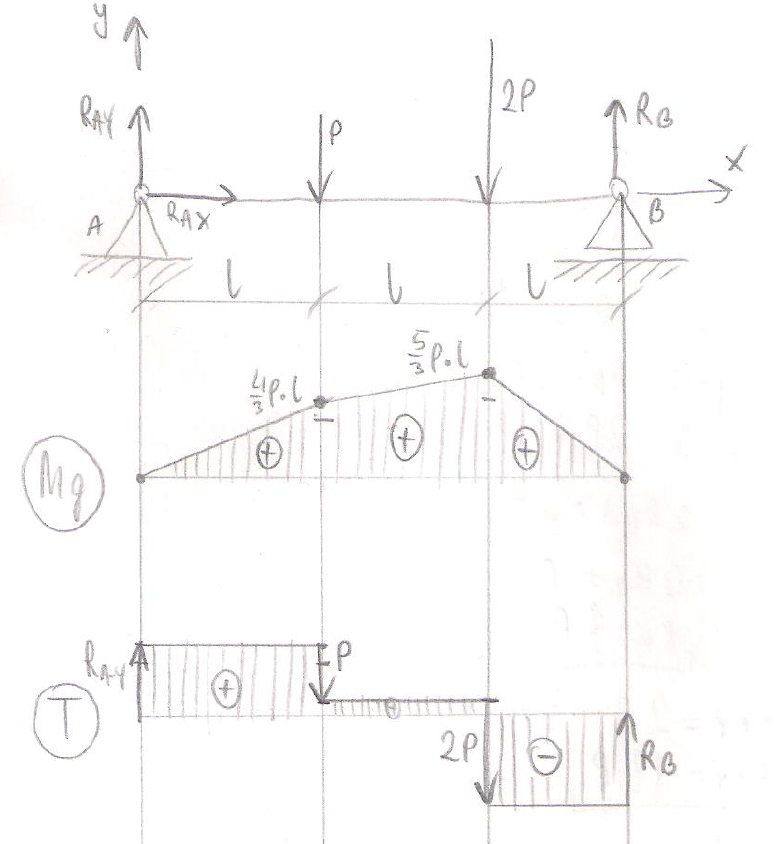
Belka podparta na dwóch podporach poddana jest obciążeniom statycznym. Na początku, w punkcie A, belka podparta jest na podporze nieruchomej. Na końcu, w punkcie B, belka podparta jest na podporze ruchomej. W przykładzie do belki zostaje przypisany dwuwymiarowy układ współrzędnych.
Belka poddana obciążeniom statycznym
Równania równowagi statycznej dla rozpatrywanego przypadku obciążonej belki.
\sum{F_{ix}} = 0 \rightarrow R_{AX} = 0 \sum{F_{iy}} = 0 \rightarrow R_{AY} - P - 2 \cdot P + R_{BY} = 0 \sum{M_{iA}} = 0 \rightarrow l \cdot P + 2 \cdot l \cdot 2 \cdot P - 3\cdot l \cdot R_{BY} = 0
Dodatkowe obliczenia wyznaczające wartości sił -> belka zdanie 1
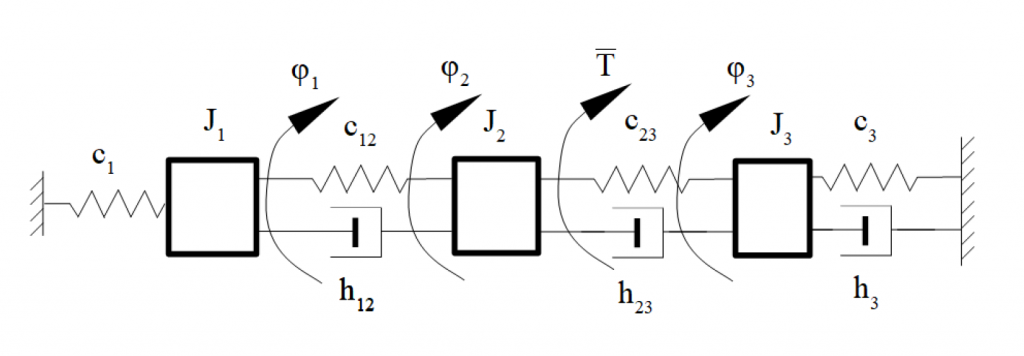
Dynamika trójmasowego układu mechanicznego w ruchu obrotowym. W rozważanym przykładzie zastosowane zostanie zapis energii w formie wariacyjnej tj. innymi słowy w postaci równań Eulera-Lagrange’a pierwszego rodzaju.
W przykładzie rozpatrzony zostanie układ mechaniczny o trzech stopniach swobody. W jednym miejscu układu przyłożony jest zewnętrzny moment T. Rozpatrywany układ posiada w swojej strukturze elementy sprężyste i tłumiące.
Wałek o masie m posiada możliwość toczenia się z równi pochyłej. Promień przekroju poprzecznego wałka wynosi r. Celem zadania jest wyznaczenie siły F, którą należy przyłożyć w środku masy wałka tak aby pozostał on w równowadze. Pomiędzy wałkiem a równią występuje tarcie toczne o współczynniku f.
Wyznaczanie równania ruchu dla masy drgającej na sprężynie. W rozważanym układzie kula o masie m [kg] jest przytwierdzona do sufitu za pomocą sprężyny o sztywności k [\frac{N}{m}].
Masa drgająca
Równanie ruchu dla rozważanego układu jest postaci:
m \cdot \vec{a} = -k\cdot \vec{x}
Rozważane równanie ruchu jest równaniem różniczkowym pierwszego rzędu o zmiennych rozdzielonych.
m \cdot \frac{d^2x}{dt^2} = -k\cdot x
Stosując zapis Newton-a tj. oznaczając kolejne pochodne względem czasu poprzez kropki nad różniczkowaną zmienną, równanie ruchu ma postać:
W układzie jak na rysunku powyżej wyznaczone zostaną równania równowagi statycznej. Rozważany układ składa się z dwóch kolcków, gdzie jeden kolcek położony jest bezpośrednio na drugim. Pomiędzy klockami występuje tarcie posuwiste.
Drgania harmoniczne są jednym z podstawowych zjawisk z jakimi mamy do czynienie w przyrodzie. W bardzo dużym skrócie można powiedzieć, ze wszystko drga. Każde ciało stałe wykonuje drgania, których częstotliwość nazywa się częstotliwością drgań własnych. Gdyby zacząć działać na ciało siłą wymuszającą o częstotliwości równej częstotliwości drgań własnych ciała to doprowadzi się je do zjawiska rezonansu mechanicznego.
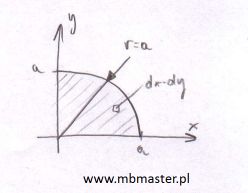
Wyznaczanie środka masy dla różnych figur płaskich i brył o jednorodnym rozkładzie masy. W zadaniach wyprowadzone są wzory na współrzędne środka masy ćwiartki koła oraz półkola.